High-Speed Flows
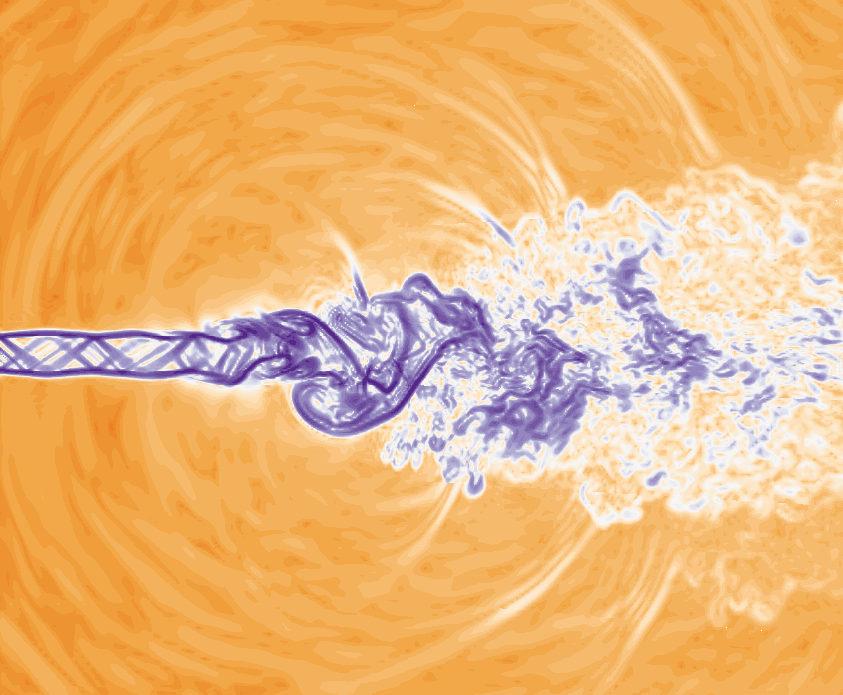
The explicit compressible flow solver performs very well for high-speed gas flows. Most recently the code has been used for simulation of the unsteady flow in a space nozzle flows with good results.
G3D::Flow is a massively parallel code for simulation of compressible and incompressible flows. The code is written in C++ and is based on the parallel solvers and data types available in the PETSc libraries. The G3D::Flow solver framework and its precursor have since several years been the backbone of the compressible flow simulation activities for the Aeroacoustics & Turbomachinery research group at the Division of Fluid Dynamics, Department of Applied Mechanics, Chalmers University of Technology.
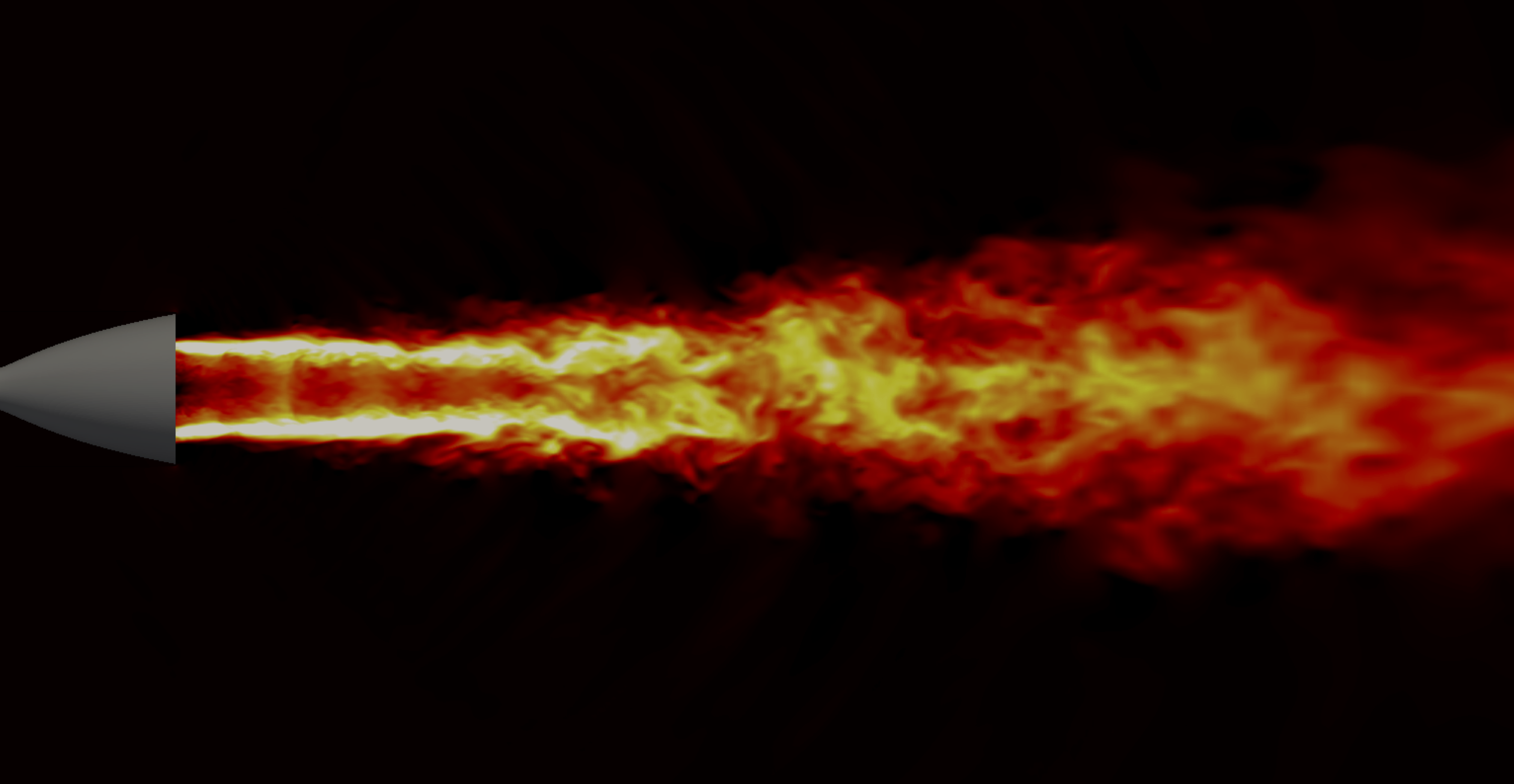
The explicit compressible flow solver performs very well for high-speed gas flows. Most recently the code has been used for simulation of the unsteady flow in a space nozzle flows with good results.
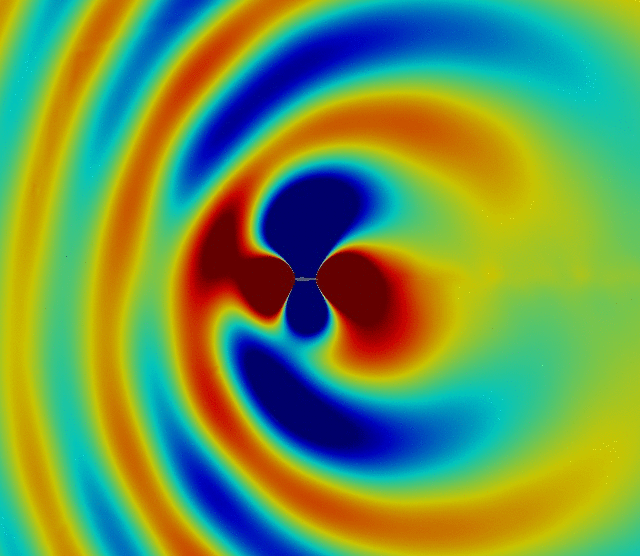
Acoustic field generated as wakes in the form of vortical gusts interacts with a single wing profile simulated using the G3D::Flow harmonic balance solver.
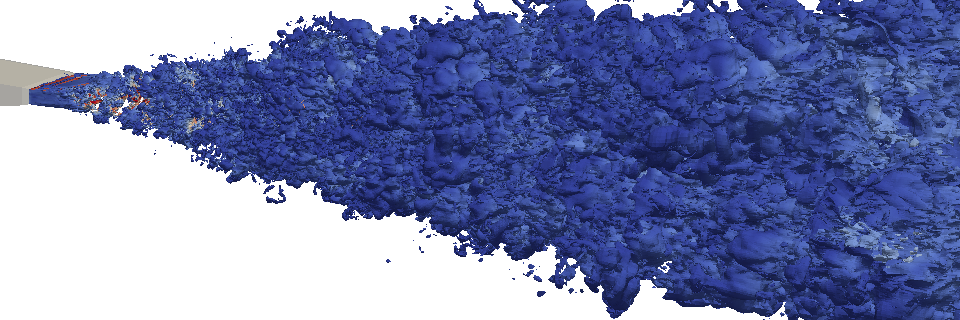
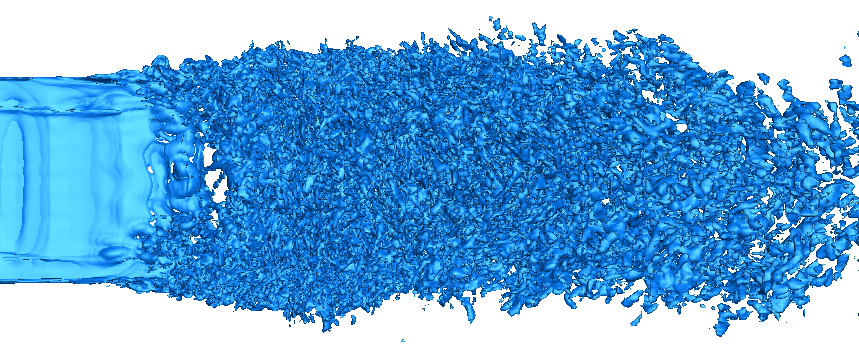
Dynamic Mode Decomposition (DMD) is a technique that can be used to extract global modes from flow field snap shots. An LES of a supersonic jet at an operating condition where screech is present has been done using G3D::Flow and the data generated has been used as input for DMD postprocessing.
The numerics in G3D::Flow is well-established after decades of successful simulation activities in the in-house tools used at the Division of Fluid Dynamics at Chalmers University of Technology. A new scheme for calculation of gradients for diffusive flux evaluation called The Preferred Direction Scheme has been developed and implemented in G3D::Flow.
Quite recently, an effort to include a massively parallel solver for simulation of unsteady incompressible flows in the G3D::Flow framework was initiated. A fraction-step solver is now included in the solver.
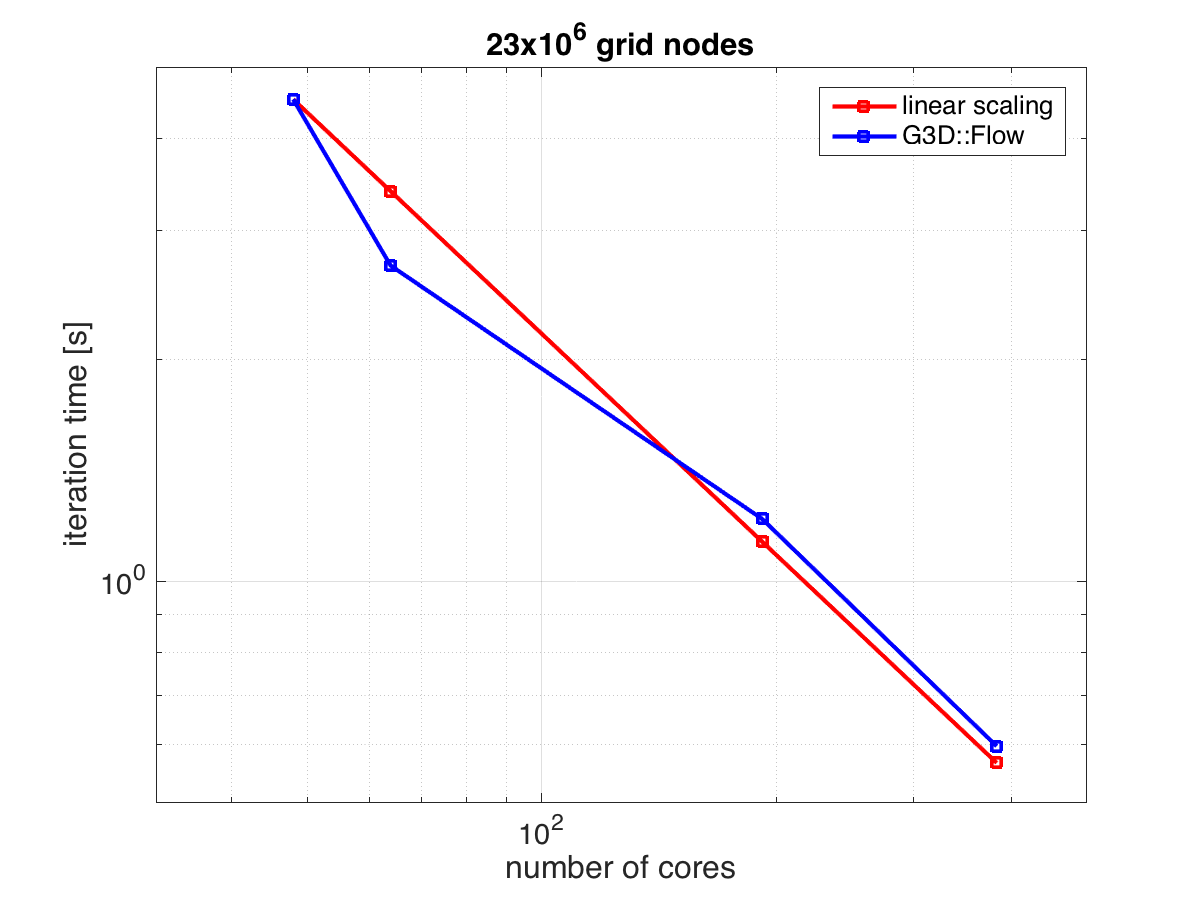
The compressible flow solver has excelent scaling properties. As shown in the figure, it scales linearly up to, at least, 400 cores.
There is a long tradition of developing in-house tools for simulation of compressible flows at the Division of Fluid Dynamics at Chalmers University of Technology and the G3D::Flow framework has been developed as an attempt of modernizing the simulation tools.
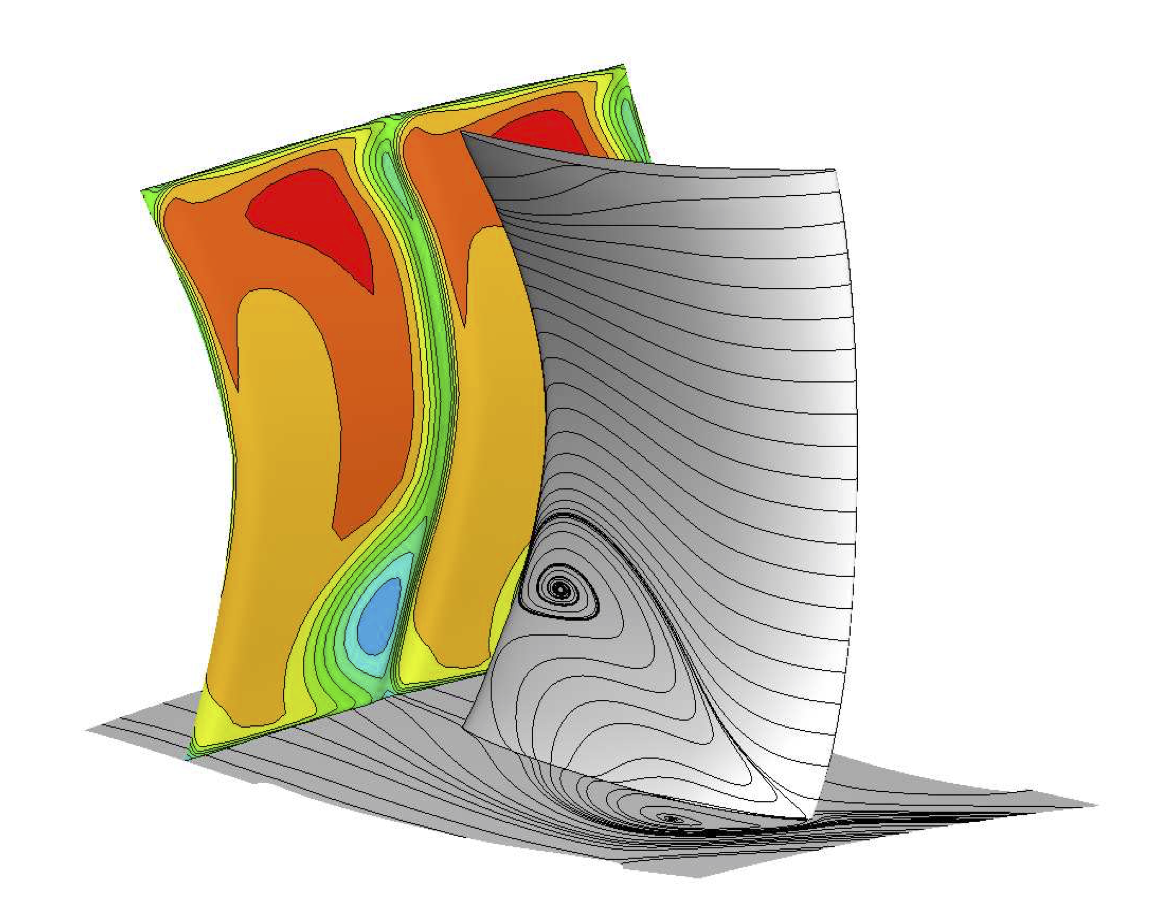
The G3D::Flow solver framework has been used for simulation of compressor stage performance and as the main CFD tool in a blade shape optimization workflow.
The G3D::Flow framework contains a wide set of models for simulating unsteady compressible and incompressible flows as well as seady-state compressible flows. The most resent addition is a suite of Hybrid LES/RANS models based on the \(k-\varepsilon\), the \(k-\omega\ SST\), and the one-equation Spalart-Allmaras models, respectively.
Prediction of flow-induced noise is one of the key functionalities in the G3D::Flow code framework.
A collection of documents and information related to the G3D::Flow solver framework.
The G3D::Flow solver framework has so far mainly been used for simulation of compressible flows and in particular for prediction of flow-induced noise. A list of relevant publications can be found here.
A reference manual is included in the G3D::Flow code and may be extracted by running make man in the code directory.
A manual for g3dflow 3.0 (Coruscant) can be found
here.
An archive of collected useful scripts and code snippets related to the G3D::Flow framework can be found here
The G3D::Flow framework uses external softwares and libraries. A collection of useful links can be found here
Presentations related to the G3D::Flow code framework can be found here
Niklas Andersson
Chalmers University of Technology
Mechanics and Maritime Sciences
Division of Fluid Dynamics
SE-412 96 Göteborg, Sweden
Send a message
The G3D::Flow solver framework is stored and maintained using a private repository at GitHub.